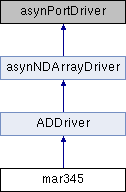
Driver for mar345 online image plate detector; communicates with the mar345dtb program over a TCP/IP socket. More...
Public Member Functions | |
| mar345 (const char *portName, const char *mar345Port, int maxBuffers, size_t maxMemory, int priority, int stackSize) | |
| Constructor for mar345 driver; most parameters are simply passed to ADDriver::ADDriver. | |
| virtual asynStatus | writeInt32 (asynUser *pasynUser, epicsInt32 value) |
| Called when asyn clients call pasynInt32->write(). | |
| virtual void | setShutter (int open) |
| Set the shutter position. | |
| virtual void | report (FILE *fp, int details) |
| Report status of the driver. | |
| void | mar345Task () |
| Should be private but accessed from C, must be public. | |
 Public Member Functions inherited from ADDriver Public Member Functions inherited from ADDriver | |
| ADDriver (const char *portName, int maxAddr, int numParams, int maxBuffers, size_t maxMemory, int interfaceMask, int interruptMask, int asynFlags, int autoConnect, int priority, int stackSize) | |
| All of the arguments are simply passed to the constructor for the asynNDArrayDriver base class, except numParams. | |
| virtual asynStatus | connect (asynUser *pasynUser) |
| Connects driver to device; This method is called when the driver's pasynCommon->connect() function is called. | |
| Public Member Functions inherited from asynNDArrayDriver | |
| asynNDArrayDriver (const char *portName, int maxAddr, int maxBuffers, size_t maxMemory, int interfaceMask, int interruptMask, int asynFlags, int autoConnect, int priority, int stackSize) | |
| This is the constructor for the asynNDArrayDriver class. | |
| virtual | ~asynNDArrayDriver () |
| virtual asynStatus | writeOctet (asynUser *pasynUser, const char *value, size_t maxChars, size_t *nActual) |
| Called when asyn clients call pasynOctet->write(). | |
| virtual asynStatus | readGenericPointer (asynUser *pasynUser, void *genericPointer) |
| This method copies an NDArray object from the asynNDArrayDriver to an NDArray pointer passed in by the caller. | |
| virtual asynStatus | writeGenericPointer (asynUser *pasynUser, void *genericPointer) |
| This method currently does nothing, but it should be implemented in this base class. | |
| virtual asynStatus | setIntegerParam (int index, int value) |
| Sets the value for an integer in the parameter library. | |
| virtual asynStatus | setIntegerParam (int list, int index, int value) |
| Sets the value for an integer in the parameter library. | |
| virtual asynStatus | createFilePath (const char *path, int pathDepth) |
| Function to create a directory path for a file. | |
| virtual asynStatus | checkPath () |
| Checks whether the directory specified NDFilePath parameter exists. | |
| virtual bool | checkPath (std::string &filePath) |
| Checks whether the directory specified exists. | |
| virtual asynStatus | createFileName (int maxChars, char *fullFileName) |
| Build a file name from component parts. | |
| virtual asynStatus | createFileName (int maxChars, char *filePath, char *fileName) |
| Build a file name from component parts. | |
| virtual asynStatus | readNDAttributesFile () |
| Create this driver's NDAttributeList (pAttributeList) by reading an XML file This clears any existing attributes from this drivers' NDAttributeList and then creates a new list based on the XML file. | |
| virtual asynStatus | getAttributes (NDAttributeList *pAttributeList) |
| Get the current values of attributes from this driver and appends them to an output attribute list. | |
| virtual void | updateTimeStamps (NDArray *pArray) |
| asynStatus | incrementQueuedArrayCount () |
| asynStatus | decrementQueuedArrayCount () |
| int | getQueuedArrayCount () |
| void | updateQueuedArrayCount () |
Public Attributes | |
| epicsEventId | startEventId |
| Should be private but accessed from C, must be public. | |
| epicsEventId | stopEventId |
| Should be private but accessed from C, must be public. | |
| epicsEventId | abortEventId |
| Should be private but accessed from C, must be public. | |
| Public Attributes inherited from asynNDArrayDriver | |
| class NDArrayPool * | pNDArrayPool |
| An NDArrayPool pointer that is initialized to pNDArrayPoolPvt_ in the constructor. | |
Detailed Description
Driver for mar345 online image plate detector; communicates with the mar345dtb program over a TCP/IP socket.
The mar345dtb program must be running and must be configured to listen for commands on a socket. This is done by adding a line like the following to the file /home/mar345/tables/config.xxx (where xxx is the detector serial number) COMMAND PORT 5001 In this example 5001 is the TCP/IP port number that the mar345dtb and this driver will use to communicate.
Constructor & Destructor Documentation
◆ mar345()
| mar345::mar345 | ( | const char * | portName, |
| const char * | serverPort, | ||
| int | maxBuffers, | ||
| size_t | maxMemory, | ||
| int | priority, | ||
| int | stackSize | ||
| ) |
Constructor for mar345 driver; most parameters are simply passed to ADDriver::ADDriver.
After calling the base class constructor this method creates a thread to collect the detector data, and sets reasonable default values for the parameters defined in this class and ADDriver.
- Parameters
-
[in] portName The name of the asyn port driver to be created. [in] serverPort The name of the asyn port driver previously created with drvAsynIPPortConfigure connected to the mar345dtb program. [in] maxBuffers The maximum number of NDArray buffers that the NDArrayPool for this driver is allowed to allocate. Set this to -1 to allow an unlimited number of buffers. [in] maxMemory The maximum amount of memory that the NDArrayPool for this driver is allowed to allocate. Set this to -1 to allow an unlimited amount of memory. [in] priority The thread priority for the asyn port driver thread. [in] stackSize The stack size for the asyn port driver thread.
Member Function Documentation
◆ mar345Task()
| void mar345::mar345Task | ( | ) |
Should be private but accessed from C, must be public.
This thread controls handling of slow events - erase, acquire, change mode.
◆ report()
|
virtual |
Report status of the driver.
Prints details about the driver if details>0. It then calls the ADDriver::report() method.
- Parameters
-
[in] fp File pointed passed by caller where the output is written to. [in] details If >0 then driver details are printed.
Reimplemented from asynNDArrayDriver.
◆ setShutter()
|
virtual |
Set the shutter position.
This method will open (1) or close (0) the shutter if ADShutterMode==ADShutterModeEPICS. Drivers will implement setShutter if they support ADShutterModeDetector. If ADShutterMode=ADShutterModeDetector they will control the shutter directly, else they will call this method.
- Parameters
-
[in] open 1 (open) or 0 (closed)
Reimplemented from ADDriver.
◆ writeInt32()
|
virtual |
Called when asyn clients call pasynInt32->write().
This function performs actions for some parameters, including ADAcquire, mar345Erase, etc. For all parameters it sets the value in the parameter library and calls any registered callbacks..
- Parameters
-
[in] pasynUser pasynUser structure that encodes the reason and address. [in] value Value to write.
Reimplemented from ADDriver.
Member Data Documentation
◆ abortEventId
| epicsEventId mar345::abortEventId |
Should be private but accessed from C, must be public.
◆ mar345Abort
|
protected |
◆ mar345ChangeMode
|
protected |
◆ mar345Erase
|
protected |
◆ mar345EraseMode
|
protected |
◆ mar345NumErase
|
protected |
◆ mar345NumErased
|
protected |
◆ mar345Res
|
protected |
◆ mar345Size
|
protected |
◆ startEventId
| epicsEventId mar345::startEventId |
Should be private but accessed from C, must be public.
◆ stopEventId
| epicsEventId mar345::stopEventId |
Should be private but accessed from C, must be public.
The documentation for this class was generated from the following file:
- /home/runner/work/areaDetector/areaDetector/ADmar345/mar345App/src/mar345.cpp