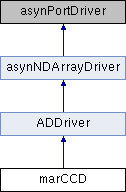
Driver for marCCD (Rayonix) CCD detector; communicates with the marCCD program over a TCP/IP socket with the marccd_server_socket program that they distribute. More...
Public Member Functions | |
| marCCD (const char *portName, const char *marCCDPort, int maxBuffers, size_t maxMemory, int priority, int stackSize) | |
| Constructor for marCCD driver; most parameters are simply passed to ADDriver::ADDriver. | |
| virtual asynStatus | writeInt32 (asynUser *pasynUser, epicsInt32 value) |
| Called when asyn clients call pasynInt32->write(). | |
| virtual asynStatus | writeFloat64 (asynUser *pasynUser, epicsFloat64 value) |
| Called when asyn clients call pasynFloat64->write(). | |
| virtual asynStatus | readEnum (asynUser *pasynUser, char *strings[], int values[], int severities[], size_t nElements, size_t *nIn) |
| virtual void | setShutter (int open) |
| Set the shutter position. | |
| virtual void | report (FILE *fp, int details) |
| Report status of the driver. | |
| void | marCCDTask () |
| This should be private but is called from C, must be public. | |
| void | getImageDataTask () |
| This should be private but is called from C, must be public. | |
 Public Member Functions inherited from ADDriver Public Member Functions inherited from ADDriver | |
| ADDriver (const char *portName, int maxAddr, int numParams, int maxBuffers, size_t maxMemory, int interfaceMask, int interruptMask, int asynFlags, int autoConnect, int priority, int stackSize) | |
| All of the arguments are simply passed to the constructor for the asynNDArrayDriver base class, except numParams. | |
| virtual asynStatus | connect (asynUser *pasynUser) |
| Connects driver to device; This method is called when the driver's pasynCommon->connect() function is called. | |
| Public Member Functions inherited from asynNDArrayDriver | |
| asynNDArrayDriver (const char *portName, int maxAddr, int maxBuffers, size_t maxMemory, int interfaceMask, int interruptMask, int asynFlags, int autoConnect, int priority, int stackSize) | |
| This is the constructor for the asynNDArrayDriver class. | |
| virtual | ~asynNDArrayDriver () |
| virtual asynStatus | writeOctet (asynUser *pasynUser, const char *value, size_t maxChars, size_t *nActual) |
| Called when asyn clients call pasynOctet->write(). | |
| virtual asynStatus | readGenericPointer (asynUser *pasynUser, void *genericPointer) |
| This method copies an NDArray object from the asynNDArrayDriver to an NDArray pointer passed in by the caller. | |
| virtual asynStatus | writeGenericPointer (asynUser *pasynUser, void *genericPointer) |
| This method currently does nothing, but it should be implemented in this base class. | |
| virtual asynStatus | setIntegerParam (int index, int value) |
| Sets the value for an integer in the parameter library. | |
| virtual asynStatus | setIntegerParam (int list, int index, int value) |
| Sets the value for an integer in the parameter library. | |
| virtual asynStatus | createFilePath (const char *path, int pathDepth) |
| Function to create a directory path for a file. | |
| virtual asynStatus | checkPath () |
| Checks whether the directory specified NDFilePath parameter exists. | |
| virtual bool | checkPath (std::string &filePath) |
| Checks whether the directory specified exists. | |
| virtual asynStatus | createFileName (int maxChars, char *fullFileName) |
| Build a file name from component parts. | |
| virtual asynStatus | createFileName (int maxChars, char *filePath, char *fileName) |
| Build a file name from component parts. | |
| virtual asynStatus | readNDAttributesFile () |
| Create this driver's NDAttributeList (pAttributeList) by reading an XML file This clears any existing attributes from this drivers' NDAttributeList and then creates a new list based on the XML file. | |
| virtual asynStatus | getAttributes (NDAttributeList *pAttributeList) |
| Get the current values of attributes from this driver and appends them to an output attribute list. | |
| virtual void | updateTimeStamps (NDArray *pArray) |
| asynStatus | incrementQueuedArrayCount () |
| asynStatus | decrementQueuedArrayCount () |
| int | getQueuedArrayCount () |
| void | updateQueuedArrayCount () |
Public Attributes | |
| epicsEventId | stopEventId |
| This should be private but is accessed from C, must be public. | |
| Public Attributes inherited from asynNDArrayDriver | |
| class NDArrayPool * | pNDArrayPool |
| An NDArrayPool pointer that is initialized to pNDArrayPoolPvt_ in the constructor. | |
Detailed Description
Driver for marCCD (Rayonix) CCD detector; communicates with the marCCD program over a TCP/IP socket with the marccd_server_socket program that they distribute.
The marCCD program must be set into Acquire/Remote Control/Start to use this driver.
Constructor & Destructor Documentation
◆ marCCD()
| marCCD::marCCD | ( | const char * | portName, |
| const char * | serverPort, | ||
| int | maxBuffers, | ||
| size_t | maxMemory, | ||
| int | priority, | ||
| int | stackSize | ||
| ) |
Constructor for marCCD driver; most parameters are simply passed to ADDriver::ADDriver.
After calling the base class constructor this method creates a thread to collect the detector data, and sets reasonable default values the parameters defined in this class, asynNDArrayDriver, and ADDriver.
- Parameters
-
[in] portName The name of the asyn port driver to be created. [in] serverPort The name of the asyn port driver previously created with drvAsynIPPortConfigure connected to the marccd_server program. [in] maxBuffers The maximum number of NDArray buffers that the NDArrayPool for this driver is allowed to allocate. Set this to -1 to allow an unlimited number of buffers. [in] maxMemory The maximum amount of memory that the NDArrayPool for this driver is allowed to allocate. Set this to -1 to allow an unlimited amount of memory. [in] priority The thread priority for the asyn port driver thread if ASYN_CANBLOCK is set in asynFlags. [in] stackSize The stack size for the asyn port driver thread if ASYN_CANBLOCK is set in asynFlags.
Member Function Documentation
◆ getImageDataTask()
| void marCCD::getImageDataTask | ( | ) |
This should be private but is called from C, must be public.
This task does the correction and file saving in the background, so that acquisition can be overlapped with these operations.
◆ marCCDTask()
| void marCCD::marCCDTask | ( | ) |
This should be private but is called from C, must be public.
This thread controls acquisition, reads TIFF files to get the image data, and does the callbacks to send it to higher layers.
◆ readEnum()
|
virtual |
◆ report()
|
virtual |
Report status of the driver.
Prints details about the driver if details>0. It then calls the ADDriver::report() method.
- Parameters
-
[in] fp File pointed passed by caller where the output is written to. [in] details If >0 then driver details are printed.
Reimplemented from asynNDArrayDriver.
◆ setShutter()
|
virtual |
Set the shutter position.
This method will open (1) or close (0) the shutter if ADShutterMode==ADShutterModeEPICS. Drivers will implement setShutter if they support ADShutterModeDetector. If ADShutterMode=ADShutterModeDetector they will control the shutter directly, else they will call this method.
- Parameters
-
[in] open 1 (open) or 0 (closed)
Reimplemented from ADDriver.
◆ writeFloat64()
|
virtual |
Called when asyn clients call pasynFloat64->write().
This function performs actions for some parameters. For all parameters it sets the value in the parameter library and calls any registered callbacks..
- Parameters
-
[in] pasynUser pasynUser structure that encodes the reason and address. [in] value Value to write.
◆ writeInt32()
|
virtual |
Called when asyn clients call pasynInt32->write().
This function performs actions for some parameters, including ADAcquire, ADBinX, etc. For all parameters it sets the value in the parameter library and calls any registered callbacks..
- Parameters
-
[in] pasynUser pasynUser structure that encodes the reason and address. [in] value Value to write.
Reimplemented from ADDriver.
Member Data Documentation
◆ marCCDBeamX
|
protected |
◆ marCCDBeamY
|
protected |
◆ marCCDDatasetComments
|
protected |
◆ marCCDDetectorDistance
|
protected |
◆ marCCDFileComments
|
protected |
◆ marCCDFrameShift
|
protected |
◆ marCCDGateMode
|
protected |
◆ marCCDOverlap
|
protected |
◆ marCCDReadoutMode
|
protected |
◆ marCCDRotationAxis
|
protected |
◆ marCCDRotationRange
|
protected |
◆ marCCDSeriesFileDigits
|
protected |
◆ marCCDSeriesFileFirst
|
protected |
◆ marCCDSeriesFileTemplate
|
protected |
◆ marCCDServerMode
|
protected |
◆ marCCDStability
|
protected |
◆ marCCDStartPhi
|
protected |
◆ marCCDState
|
protected |
◆ marCCDStatus
|
protected |
◆ marCCDTaskAcquireStatus
|
protected |
◆ marCCDTaskCorrectStatus
|
protected |
◆ marCCDTaskDezingerStatus
|
protected |
◆ marCCDTaskReadoutStatus
|
protected |
◆ marCCDTaskSeriesStatus
|
protected |
◆ marCCDTaskWritingStatus
|
protected |
◆ marCCDTiffTimeout
|
protected |
◆ marCCDTwoTheta
|
protected |
◆ marCCDWavelength
|
protected |
◆ stopEventId
| epicsEventId marCCD::stopEventId |
This should be private but is accessed from C, must be public.
The documentation for this class was generated from the following file:
- /home/runner/work/areaDetector/areaDetector/ADmarCCD/marCCDApp/src/marCCD.cpp