ADEuresys
- author:
Mark Rivers, University of Chicago
Overview
This is an areaDetector driver for CoaXPress cameras using the Euresys CoaxLink frame grabbers and EGrabber SDK.
CoaXPress is a high-speed camera interface using one or more parallel coaxial cables between the camera and a frame grabber in a computer. The following table shows the speeds and cable length limits for different standard CoaXPress bit rates.
Name |
Bit rate |
Maximum cable length with Belden 1694A RG-6 cables |
|---|---|---|
CXP-1 |
1.25 Gbit/s |
130 m |
CXP-2 |
2.5 Gbit/s |
110 m |
CXP-3 |
3.125 Gbit/s |
100 m |
CXP-5 |
5.0 Gbit/s |
60 m |
CXP-6 |
6.25 Gbit/s |
40 m |
CXP-10 |
10.0 Gbit/s |
40 m |
CXP-12 |
12.5 Gbit/s |
30 m |
A CXP-12 X4 camera has 4 parallel CXP-12 links, and thus runs at a total rate of 50 Gbit/s.
CoaXPress cameras use the GenICam standard. GenICam is a Generic Interface for Cameras from the European Machine Vision Association (EMVA).
ADEuresys is derived from the base class ADGenICam, which handles many of the details of mapping GenICam features to EPICS records. ADEuresys class describes this class in detail.
ADEuresys uses the Euresys EGrabber SDK. It runs on most versions of Windows and Linux. The driver is identical on Windows and Linux, there is no OS-specific code in the driver.
ADEuresys currently only supports CoaXPress frame grabbers. EGrabber also supports their CameraLink frame grabbers and GigE cameras. Support for these could be added in the future, either as part of ADEuresys, or as a separate areaDetector driver.
The EGrabber SDK must be downloaded and installed prior to building the driver. It can be found in the Download area on the Euresys website. On Windows this is a standard installation procedure. On Linux there is an install.sh script which builds the kernel driver for the frame grabber and installs the include and binary files in /opt/euresys.
The ADEuresys/configure/CONFIG_SITE or ADEuresys/configure/CONFIG_SITE.$(EPICS_HOST_ARCH).Common files must be edited to point to the location of the include files on the local system.
Prior to using ADEuresys with a specific camera model, the XML file must be read from the camera using the Euresys gentl utility. Run the command:
gentl xml
This will extract the XML files for both the camera and the GenTL components System, Interface, Device, and DataStream and save as files in the current default directory.
The EPICS database file and OPI screens must then be generated from the camera XML file by running the Python programs as described in the ADGenICam documentation.
ADEuresys driver
ADEuresys inherits from ADGenICam. It adds the following parameters and EPICS records that are specific to ADEuresys.
EPICS record names |
Record types |
drvInfo string |
Description |
|---|---|---|---|
TimeStampMode, TimeStampMode_RBV |
bo, bi |
ES_TIME_STAMP_MODE |
Controls whether the TimeStamp attribute comes from the camera internal time stamp or from the EPICS time. Choices are Camera (0), and EPICS (1). |
UniqueIdMode, UniqueIdMode_RBV |
bo, bi |
ES_UNIQUE_ID_MODE |
Controls whether the UniqueId attribute comes from the camera internal value or from the driver. Choices are Camera (0), and Driver (1). |
UnpackingMode, UnpackingMode_RBV |
mbbo, mbbi |
ES_UNPACKING_MODE |
Controls conversion of Mono10 and Mono12 formats to Mono16. Mono10 and Mono12 data are sent across the CXP cables in packed format. These formats can be unpacked by the DMA engine to Mono16 with the following choices:
|
ConvertPixelFormat, ConvertPixelFormat_RBV |
mbbo, mbbi |
ES_CONVERT_PIXEL_FORMAT |
Controls conversion of the pixel format read from the camera to a different format. For example this can be used to convert Bayer to RGB which allows the camera to send 8-bit data over the bus and then convert to 24-bit RGB on the host computer, reducing the required bandwidth and increasing the frame rate. NOTE: This is currently not implemented in the driver because I don’t have a color camera to use for testing. |
ESBufferSize |
longin |
ES_BUFFER_SIZE |
The number of EGrabber buffers allocated when the driver is created. |
OutputQueue |
longin |
ES_OUTPUT_QUEUE |
The number of buffers in the EGrabber output queue waiting for the ADEuresys driver to process. |
RejectedFrames |
longin |
ES_REJECTED_FRAMES |
The number of frames that the EGrabber dropped when the output queue overflowed because the ADEuresys driver could not keep up. |
CRCErrors |
longin |
ES_CRC_ERROR_COUNT |
The number CRC errors on the CoVisionaXPress links to the camera. |
ResetErrorCounts |
bo |
ES_RESET_ERROR_COUNTS |
Resets RejectedFrames and CRCErVisionrors to 0. |
ProcessTotalTime |
ai |
ES_PROCESS_TOTAL_TIME |
The total execution time of the frame callback function in ms. |
ProcessCopyTime |
ai |
ES_PROCESS_COPY_TIME |
The time in ms required to copy the data from the EGrabber buffer to the NDArray in the frame callback function. This is included in ProcessTotalTime. |
IOC startup script
The command to configure an ADEuresys camera in the startup script is:
ADEuresysConfig(const char *portName, const char *cameraId, int numEGBuffers,
size_t maxMemory, int priority, int stackSize)
portName is the name for the ADEuresys port driver
cameraId is used to identify which camera to control.
In most cases there will be a single frame grabber card in the system, connected to a single camera.
This parameter is currently not implemented, but could be in the future if it is desired to use
multiple cameras from one computer.
numEGBuffers is the number of buffers to allocate in EGrabber. If set to 0 or omitted the default of 100 will be used.
maxMemory is the maximum amount of memory the NDArrayPool is allowed to allocate. 0 means unlimited.
priority is the priority of the port thread. 0 means medium priority.
stackSize is the stack size. 0 means medium size.
Cameras Tested
ADEuresys has been tested with 3 very different cameras, shown in the following table.
Model |
Mikrotron EoSens 2.0MCX12 |
Adimec Q-12A |
ViewWorks VNP604 |
|---|---|---|---|
Pixel dimensions |
1920 x 1080 |
4096 x 3072 |
14192 x 10640 |
MegaPixels |
2.1 |
12.6 |
151.0 |
CXP version |
CXP-12 X4 |
CXP-6 X4 |
CXP-6 X4 |
Frames/s, Mono8 |
2247 |
187 |
6.5 |
GBytes/s. Mono8 |
4.66 |
2.35 |
1.0 |
Frames/s, Mono10 |
1798 |
152 |
6.2 |
GBytes/s. Mono10 |
7.46 |
3.83 |
2.0 |
Frames/s, Mono12 |
N.A |
N.A |
6.2 |
GBytes/s. Mono12 |
N.A |
N.A |
2.0 |
The ADEuresys driver can collect the images from these cameras at the full specified frame rates in the table above, with one exception. The Mikrotron camera in 10-bit mode has a maximum from rate of 1798 frames/s. However, ADEuresys only receives 1668 frames/s on Linux and 1703 frames/s on Windows. This is due to limitations on the PCIe transfer speeds of the frame grabber when expanding the 10-bit frames to 16-bit.

Mikrotron EoSens 2.0MCX12

Adimec Q-12A

ViewWorks VNP604
File saving benchmarks
The following table shows the results of writing data to disk with the NDFileHDF5 plugin. These tests were done on a computer with the following specifications:
Model: Dell Precision 5860
Processor: Intel Xeon w5-2445, 3100 MHz
RAM: 256GB
Disk: 1 TB MVMe in M.2 slot on motherboard
OS: Windows 10 and CentOS 9 Stream, dual boot
CoaXPress card: Euresys CoaxLink CXP-12
The tests were done in both Mono8, and Mono10 or Mono12 modes. In Mono8 mode the NDArrays are UInt8. In Mono10 or Mono12 modes the NDArrays are UInt16. The same tests were done on Windows 10 and CentOS 9 Stream.
In each mode tests were done with the HDF5 plugin in both Stream mode and Capture mode.
In Stream mode the HDF5 files are written to disk as they are being collected. The camera frame rate was adjusted to the value that led to no dropped frames when saving the specified number of frames, while using a 2000 frame queue.
In Capture mode the specified number of frames were saved into the capture buffer at the full frame rate for that mode. The HDF5 file was then written to disk after the capture was complete, and the total time to write the file was measured. This allows calculating the file saving frame rate and data rate.
Format |
OS |
Camera frames/s |
File mode |
File frames/s |
GB/s |
|---|---|---|---|---|---|
Mono8 |
Linux |
2247 |
Stream |
1400 |
2.90 |
Mono8 |
Windows |
2247 |
Stream |
1700 |
3.53 |
Mono8 |
Linux |
2247 |
Capture |
1429 |
2.96 |
Mono8 |
Windows |
2247 |
Capture |
1786 |
3.70 |
Mono10 |
Linux |
1668 |
Stream |
650 |
2.70 |
Mono10 |
Windows |
1703 |
Stream |
800 |
3.32 |
Mono10 |
Linux |
1668 |
Capture |
666 |
2.76 |
Mono10 |
Windows |
1703 |
Capture |
909 |
3.77 |
Format |
OS |
Camera frames/s |
File mode |
File frames/s |
GB/s |
|---|---|---|---|---|---|
Mono8 |
Linux |
187 |
Stream |
187 |
2.35 |
Mono8 |
Windows |
187 |
Stream |
187 |
2.35 |
Mono8 |
Linux |
187 |
Capture |
286 |
3.60 |
Mono8 |
Windows |
187 |
Capture |
312 |
3.93 |
Mono10 |
Linux |
152 |
Stream |
90 |
2.27 |
Mono10 |
Windows |
152 |
Stream |
90 |
2.27 |
Mono10 |
Linux |
152 |
Capture |
92 |
2.32 |
Mono10 |
Windows |
152 |
Capture |
84 |
2.11 |
Format |
OS |
Camera frames/s |
File mode |
File frames/s |
GB/s |
|---|---|---|---|---|---|
Mono8 |
Linux |
6.2 |
Stream |
6.2 |
0.94 |
Mono8 |
Windows |
6.2 |
Stream |
6.2 |
0.94 |
Mono8 |
Linux |
6.2 |
Capture |
16.7 |
2.52 |
Mono8 |
Windows |
6.2 |
Capture |
9.7 |
1.46 |
Mono12 |
Linux |
6.2 |
Stream |
6.2 |
1.87 |
Mono12 |
Windows |
6.2 |
Stream |
5.0 |
1.51 |
Mono12 |
Linux |
6.2 |
Capture |
8.8 |
2.66 |
Mono12 |
Windows |
6.2 |
Capture |
3.7 |
1.11 |
I tried three schemes to see if I could increase the file saving rate to keep up with the Mikrotron camera.
The first was to load 2 NDFileHDF5 plugins, and use NDPluginScatter to send every other frame to each plugin. If file rate was limited by CPU load on the HDF5 plugin this should improve performance. I found that this did not help at all, each plugin ran at 50% of the frame rate of a single HDF5 plugin. I believe this indicates that the rate is limited by a global mutex in the HDF5 library, since neither plugin was CPU bound, and I don’t think they were limited by the NVMe disk write rate.
The second scheme was to create 2 pvaDriver IOCs on the same computer. Each of these runs an HDF5 file writer. The ADEuresys IOC loads 2 NDPluginPva plugins, each connected to one of the pvaDriver IOCs. NDPluginScatter on the ADEuresys IOC sends every other frame to each NDPluginPva. This did not work because the PVA links could not keep up. I also found that the PVA links dropped frames even at 100 frames/s. This needs to be investigated, because PVA should not be dropping frames under low loads.
The third scheme was to write a new file plugin called NDFileJRaw. This plugin uses a simple raw format, using the low-level OS-specific calls to write the NDArrays. The “J” in JRaw indicates a future plan to put JSON metadata in the file to indicate the data format and size, and possibly to store NDAttributes. I found that writing files with JRaw, both in Stream mode and Capture mode, did not result in a statistically significant improvement over HDF5. In some cases it was faster, but in some it was slower. The results are in the benchmarks.txt file in the docs/ADEuresys directory. For brevity I have not included them in the table above.
MEDM screens
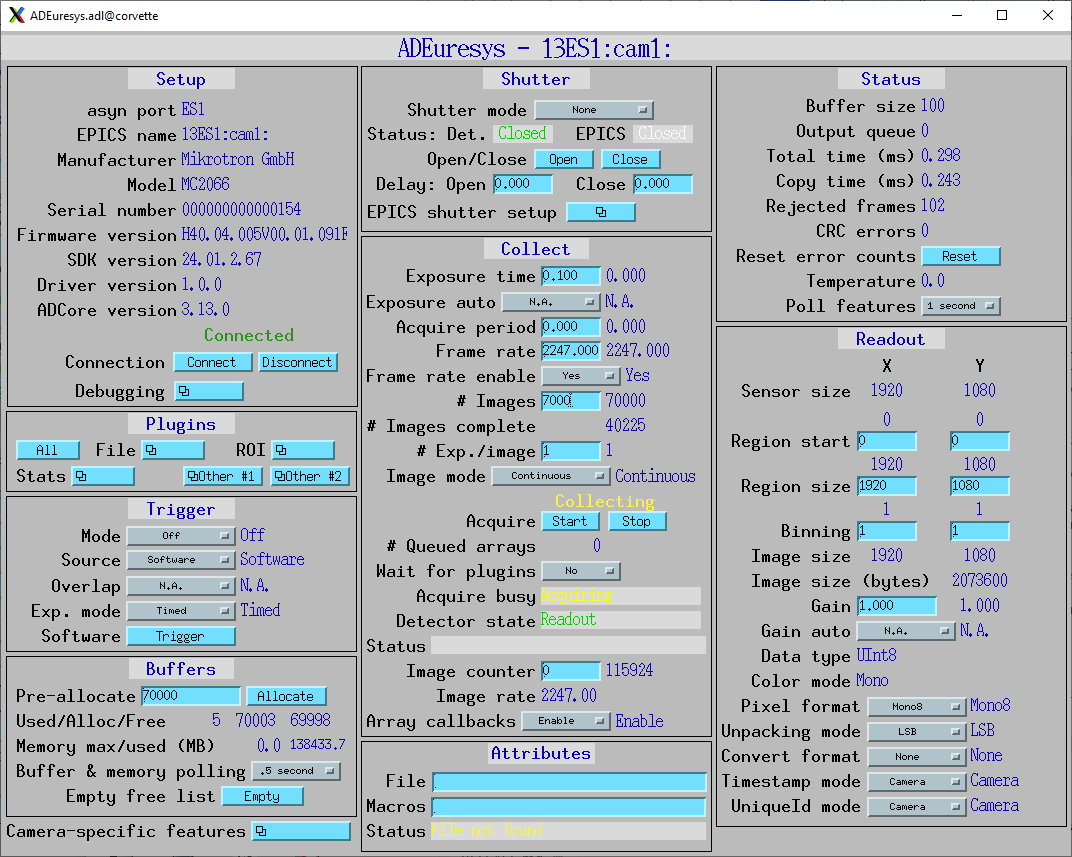
The following is the MEDM screen ADEuresys.adl when controlling a Miktron EoSens 2.0MCX12 camera. ADEuresys.adl is very similar to ADGenICam.adl, with a few additional widgets for the PVs that are specific to ADEuresys.
Note that each frame is 2.1 MB, and it is collecting 2,247 frames/s, which is 4.66 GB/s.
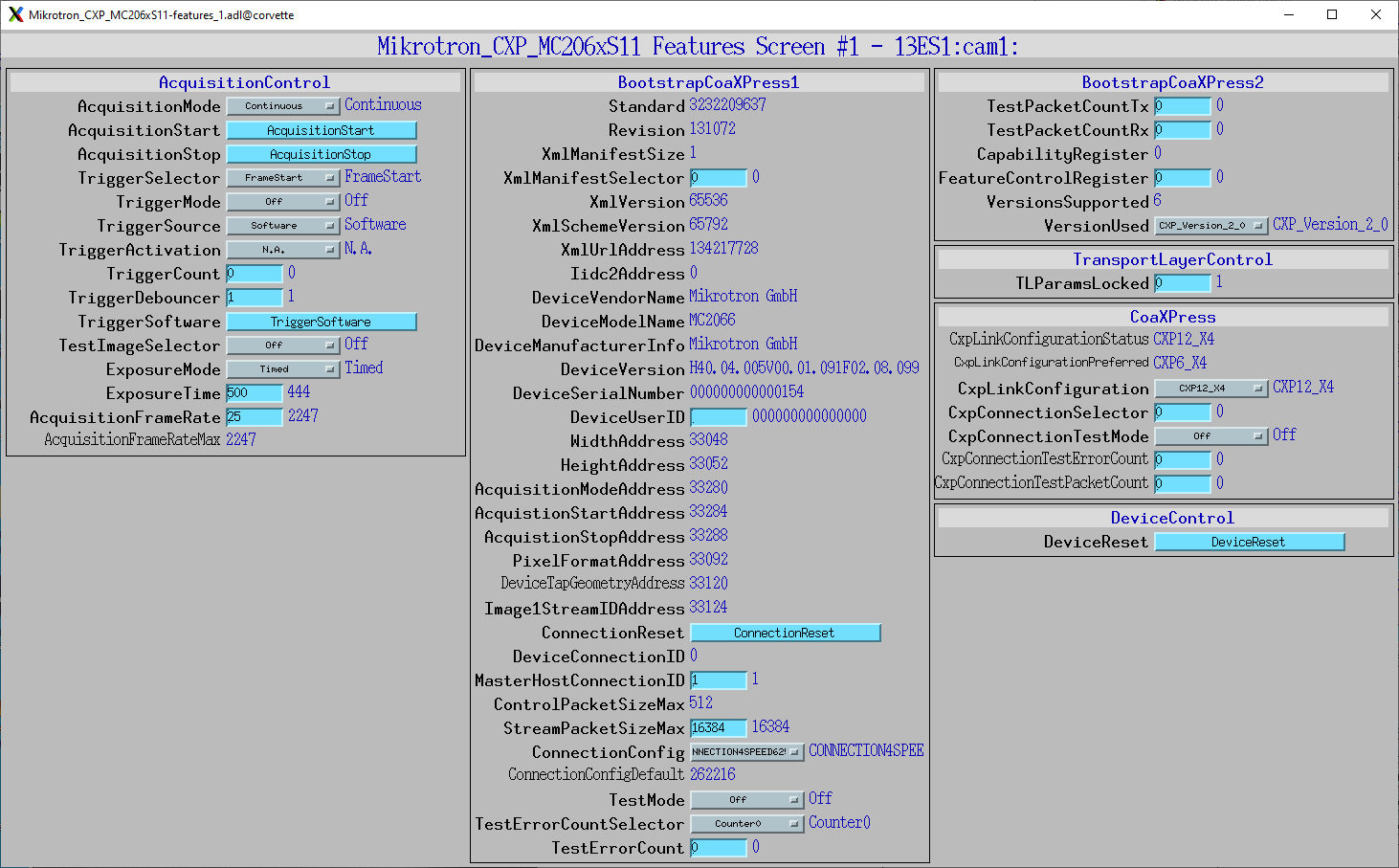
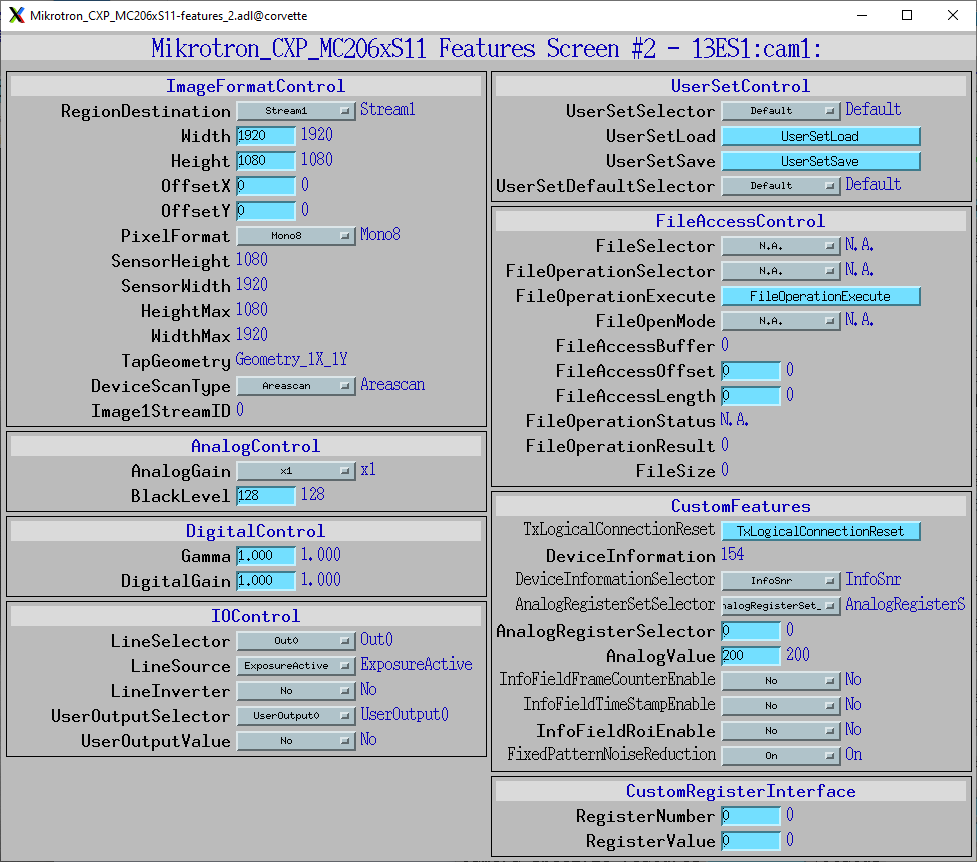
The following are the camera-specfic features MEDM screens for the Mikrotron camera. These screens were autogenerated by the Python script in ADGenICam, and are specific to this camera model. They are loaded from the “Camera-specific features” related display widget in the above screen.