ADHamamatsuDCAM
- author:
Hamamatsu Corporation and Mark Rivers, University of Chicago
Overview
This is an areaDetector driver for Hamamatsu cameras using the DCAM library. It runs on Windows, and on some versions of Linux.
Installation
Prior to building ADHamamatsuDCAM the DCAM software must be downloaded. This consists of 2 packages:
DCAM-API, which contains the required Windows or Linux drivers.
DCAM-SDK4, which contains the SDK library that ADHamamatsuDCAM calls.
DCAM-API on Linux is officially supported on Ubuntu 22.04 LTS and Debian 11.
DCAM-SDK4 is downloaded as a .zip file for Windows, and a tar.gz file for Linux. These do not contain an installer, so there is no standard location for the dcamsdk4 directory, the user must chose a location. The ADHamamatsuDCAM driver needs to find these files when compiling. This is done by defining the path to dcamsdk4 in these files:
ADHamamatsuDCAM/configure/CONFIG_SITE.$(EPICS_HOST_ARCH).Common
ADHamamatsuDCAM/iocs/hamamatsuIOC/configure/CONFIG_SITE.$(EPICS_HOST_ARCH).Common
Examples are provided in the distribution.
On Windows the file dcamsdk4/samples/cpp/misc/config4.h needs to be edited to comment out #pragma lines as shown here:
/*
#if defined(_WIN64)
#pragma comment(lib,"../../../lib/win64/dcamapi.lib")
#elif defined(WIN32)
#pragma comment(lib,"../../../lib/win32/dcamapi.lib")
#endif
*/
ADHamamatsuDCAM driver
ADHamamatsuDCAM inherits from ADDriver. It adds the following parameters and EPICS records that are specific to ADHamamatsuDCAM.
EPICS record names |
Record types |
drvInfo string |
Description |
|---|---|---|---|
HamaRegionReset |
bo |
HamaRegionReset |
Resets the readout region to full chip |
HamaTriggerSource, HamaTriggerSource_RBV” |
mbbo, mbbo |
HamaTriggerSource |
Trigger source. Choices are “Internal” (0), “External” (1), and “Software” (2) |
HamaTriggerMode, HamaTriggerMode_RBV” |
mbbo, mbbo |
HamaTriggerMode |
Trigger mode. Choices are “Normal” (0), and “Start” (1) |
HamaTriggerActive, HamaTriggerActive_RBV” |
mbbo, mbbo |
HamaTriggerActive |
Trigger active. Choices are “Edge” (0), “Level” (1), and “Syncreadout” (2) |
HamaTriggerPolarity, HamaTriggerPolarity_RBV” |
mbbo, mbbo |
HamaTriggerPolarity |
Trigger polarity. Choices are “Negative” (0), and “Positive” (1) |
HamaFireTrigger |
bo |
HamaFireTrigger |
Fires the trigger in Software mode |
HamaTriggerTimes, HamaTriggerTimes_RBV |
longout, longin |
HamaTriggerTimes |
Number of triggers |
HamaTriggerDelay, HamaTriggerDelay_RBV |
ao, ai |
HamaTriggerDelay |
Trigger delay time |
HamaSensorCoolerStatus_RBV |
waveform |
HamaSensorCoolerStatus |
Cooler status |
HamaReadoutSpeed, HamaReadoutSpeed_RBV” |
mbbo, mbbo |
HamaReadoutSpeed |
Readout speed. Choices are “Slowest” (0), and “Fastest” (1) |
hamamatsu class describes this class in detail.
IOC startup script
The command to configure an ADHamamatsuDCAM camera in the startup script is:
hamamatsuConfig(const char *portName, int cameraId,
int maxMemory, int priority, int stackSize)
portName is the name for the ADHamamatsuDCAM port driver
cameraId is index of the camera in the available camera list.
maxMemory is the maximum amount of memory the NDArrayPool is allowed to allocate. 0 means unlimited.
priority is the priority of the port thread. 0 means medium priority.
stackSize is the stack size. 0 means medium size.
MEDM screen
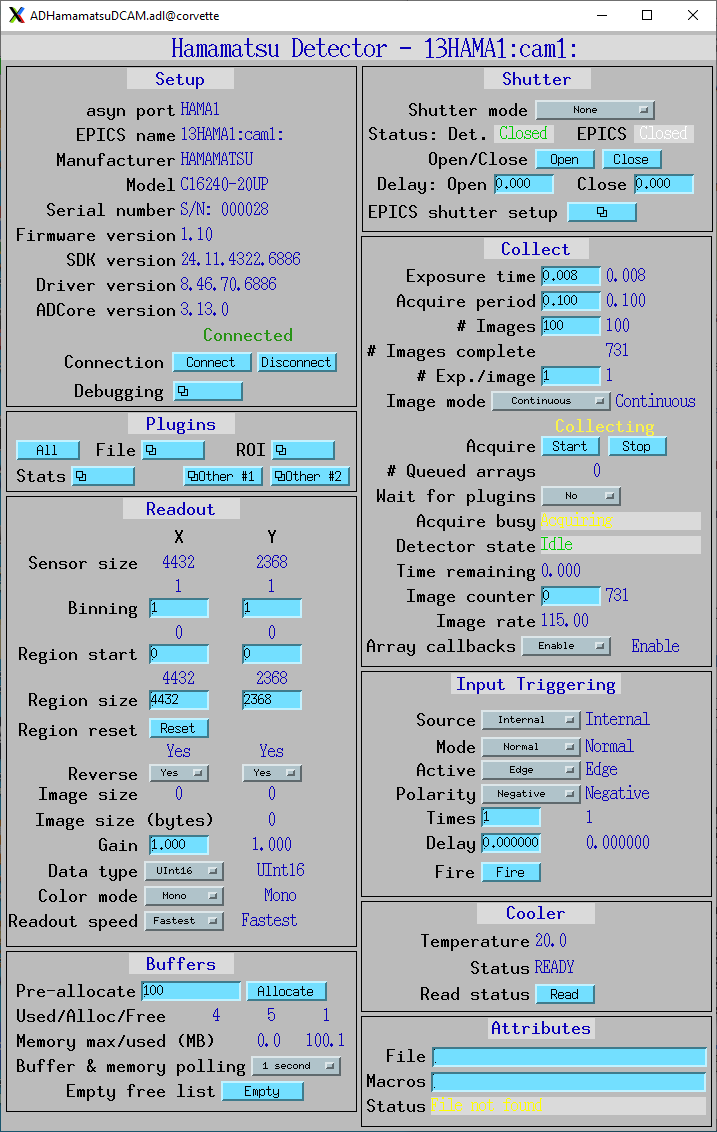
The following is the MEDM screen ADHamamatsuDCAM.adl when controlling an Orca Fire camera.
Note that each frame is 20.0 MB, and it is collecting 115 frames/s, which is 2.3 GB/s.
Issues
The following issues have been identified:
The driver is not setting the ArraySize PVs
Color support should be removed from the medm screen.
Data types other than UInt16 and UInt8 should be removed from the menu
Data type UInt8 does not seem to work, the data are still UInt16.
AcquirePeriod is not implemented because the Orca Fire does not support it.
RHEL 9 should be supported if possible.