ADAndor3
- author:
Mark Rivers (University of Chicago), Phillip Sorensen (Cornell University)
Table of Contents
Introduction
This is an EPICS areaDetector driver for CMOS detectors from Andor Technology. It has been tested on the Andor Neo sCMOS camera with 3-tap Camera Link interface, but should work with other cameras (e.g. Zyla) as well. The driver is supported on 32-bit and 64- bit Linux and 32-bit and 64-bit Windows. The driver is called “Andor3” because it is built with Version 3 of the Andor Software Development Kit (SDK). This version of the SDK is required to work with the Andor sCMOS cameras, and currently does not work with the Andor CCD cameras.
The driver provides access to essentially all of the features of the Andor sCMOS cameras:
Fixed number of frames or continuous acquisition.
Multiple accumulations per frame.
Readout frequency
Readout mode (11-bit low noise, 11-bit high-well, 16 bit combination).
Support for all of the Andor trigger modes
Binning and Area Of Interest (AOI) readout
Set and monitor the camera temperature
Set the camera fan speed.
Gating and Image Intensifier settings
This driver inherits from ADDriver. It implements many of the parameters in asynNDArrayDriver.h and in ADArrayDriver.h. It also implements a number of parameters that are specific to the Andor detectors. The andor3 class documentation describes this class in detail.
This document does not attempt to explain the meaning of the Andor-specific parameters. The Andor Software Development Kit documentation provides this detailed information. Andor does not allow me to redistribute the SDK documentation as part of areaDetector. It must be obtained from Andor’s Web site.
The Andor3 SDK is very well designed. Camera parameters (e.g. exposure time, binning) are called “features”. Features can be integer, float, bool, string, or enum. Each feature can be queried to determine if it is implemented on the current detector. In addition:
For integer and float features:
What is the valid range of values for the current camera under the current conditions?
For enum features
How many enum choices are there?
For each enum choice:
What is the string associated with that enum choice?
Is that choice implemented for the current camera?
If it is implemented, is it valid under the current conditions?
Ability to register a user-defined C callback function that will be called whenever a feature value changes. These changes can be the indirect result of changing another feature. For example, changing the binning might force the exposure time to change, etc.
The areaDetector driver uses these features. All of the enum menus are built dynamically at iocInit, they are not preset in the template file. This ensures that the enum choices match the actual capabilities of the current camera. Whenever an integer or float parameter is changed it is checked to ensure it is within the current valid bounds for that feature. The feature callback is used to ensure that the current EPICS readback value of that parameter matches the actual camera value, without requiring the driver to poll.
areaDetector includes the header and library files required to build the andor3 driver on any Linux or Windows computer. However, it does not include the shareable libraries, DLLs or drivers to actually run a detector. Those must be obtained from Andor, either by purchasing their SDK or their Solis application software. On Windows the path to the directory containing the Andor DLLs from the SDK or Solis must be added to the PATH environment variable when running the areaDetector IOC. On Linux the path to the directory containing the Andor shareable libraries from the SDK must be added to the LD_LIBRARY_PATH environment variable when running the areaDetector IOC.
Note: Linux drivers and Bitflow based camera may require the removal of files /usr/local/lib/libatusb*. These files sometime interfere with Bitflow based cameras on Linux (per Andor).
Implementation of standard driver parameters
The following table describes how the Andor driver implements some of the standard driver parameters.
Implementation of Parameters in asynNDArrayDriver.h and ADDriver.h, and EPICS Record Definitions in ADBase.template and NDFile.template |
||
|---|---|---|
Parameter index variable |
EPICS record name |
Description |
ADTriggerMode |
$(P)$(R)TriggerMode, $(P)$(R)TriggerMode_RBV |
Sets the trigger mode for the detector. Options for the Neo are:
|
ADImageMode |
$(P)$(R)ImageMode, $(P)$(R)ImageMode_RBV |
Sets the image mode for the detector. Options are:
|
ADNumExposures |
$(P)$(R)NumExposures, $(P)$(R)NumExposures_RBV |
Sets the number of accumulations per image. This is performed in Andor’s driver, not on the chip. |
ADNumImages |
$(P)$(R)NumImages, $(P)$(R)NumImages_RBV |
Sets the number of images to take when ImageMode=Fixed. |
ADAcquirePeriod |
$(P)$(R)AcquirePeriod, $(P)$(R)AcquirePeriod_RBV |
Sets the FrameRate (=1./AcquirePeriod). The FrameRate can also be set directly.
|
NDDataType |
$(P)$(R)DataType, $(P)$(R)DataType_RBV |
The data type for the image data. Allowed values are:
|
ADTemperature |
$(P)$(R)Temperature, $(P)$(R)Temperature_RBV |
Sets the setpoint temperature of the camera. |
ADTemperatureActual |
$(P)$(R)TemperatureActual |
Reads the actual temperature of the camera. |
Andor specific parameters
Parameter Definitions in andor3.cpp and EPICS Record Definitions in andor3.template |
||||||
|---|---|---|---|---|---|---|
Parameter index variable |
asyn interface |
Access |
Description |
drvInfo string |
EPICS record name |
EPICS record type |
Version information |
||||||
Andor3SerialNumber |
asynOctet |
R/O |
Camera serial number |
A3_SERIAL_NUMBER |
SerialNumber |
stringin |
Andor3FirmwareVersion |
asynOctet |
R/O |
Camera firmware version |
A3_FIRMWARE_VERSION |
FirmwareVersion |
stringin |
Andor3SoftwareVersion |
asynOctet |
R/O |
SDK software version |
A3_SOFTWARE_VERSION |
SoftwareVersion |
stringin |
Andor3ControllerID |
asynOctet |
R/O |
Camera controller ID |
A3_CONTROLLER_ID |
ControllerID |
stringin |
Cooling control and status |
||||||
Andor3SensorCooling |
asynInt32 |
R/W |
Turn the sensor cooler on and off |
A3_SENSOR_COOLING |
SensorCooling, SensorCooling_RBV |
bo, bi |
Andor3TempStatus |
asynInt32 |
R/O |
Temperature status. Values and strings on the Neo are:
|
A3_TEMP_STATUS |
TempStatus_RBV |
mbbi |
Andor3TempControl |
asynInt32 |
R/W |
Temperature setpoint value in degrees C. On the cooled cameras (e.g. Neo) the temperature
is set to discrete values, rather than continuously with the Temperature record,
because the firmware does pixel corrections for specific temperatures. Choices on
the Neo are:
|
A3_TEMP_CONTROL |
TempControl, TempControl_RBV |
mbbo, mbbi |
Andor3FanSpeed |
asynInt32 |
R/W |
Fan speed. Choices on the Neo are:
|
A3_FAN_SPEED |
FanSpeed, FanSpeed_RBV |
mbbo, mbbi |
Readout control and status |
||||||
Andor3ShutterMode |
asynInt32 |
R/W |
Selects the shutter mode. Choices for the Neo are:
|
A3_SHUTTER_MODE |
A3ShutterMode, A3ShutterMode_RBV |
mbbo, mbbi |
Andor3FrameRate |
asynFloat64 |
R/W |
Frame rate. This is the reciprocal of ADAcquirePeriod, and is the units used to
control the Andor cameras. There are two limitations on the frame rate:
|
A3_FRAME_RATE |
FrameRate, FrameRate_RBV |
ao, ai |
Andor3TransferRate |
asynFloat64 |
R/O |
The maximum transfer rate in frames/s of the interface (e.g. CameraLink card). This is the maximum sustained FrameRate which can be achieved. |
A3_TRANSFER_RATE |
TransferRate |
ai |
Andor3PreAmpGain |
asynInt32 |
R/W |
Controls the pre-amp gain and readout mode. Choices for the Neo are:
|
A3_PRE_AMP_GAIN |
PreAmpGain, PreAmpGain_RBV |
mbbo, mbbi |
Andor3PixelEncoding |
asynInt32 |
R/W |
Controls the pixel encoding. Choices for the Neo are:
|
A3_PIXEL_ENCODING |
PixelEncoding, PixelEncoding_RBV |
mbbo, mbbi |
Andor3ReadoutRate |
asynInt32 |
R/W |
Controls the ADC readout rate. Choices for the Neo are:
|
A3_READOUT_RATE |
ReadoutRate, ReadoutRate_RBV |
mbbo, mbbi |
Andor3ReadoutTime |
asynFloat64 |
R/O |
The readout time from the sensor into camera RAM. |
A3_READOUT_TIME |
ReadoutTime |
ai |
Andor3Overlap |
asynInt32 |
R/W |
Controls whether acquisition and readout are overlapped. Choices are 0 (No) and 1 (Yes). On the Neo if Overlap=Yes then the minimum exposure time is limited to about 10 ms. If Overlap=No then the minimum exposure time is 9 microseconds. |
A3_OVERLAP |
Overlap, Overlap_RBV |
bo, bi |
Andor3NoiseFilter |
asynInt32 |
R/W |
Controls whether the firmware applies the Spurious Noise Filter. Choices are 0 (No) and 1 (Yes). |
A3_NOISE_FILTER |
NoiseFilter, NoiseFilter_RBV |
bo, bi |
Trigger control |
||||||
Andor3SoftwareTrigger |
asynInt32 |
R/W |
Writing 1 to this record generates a software trigger if TriggerMode=Software. |
A3_SOFTWARE_TRIGGER |
SoftwareTrigger |
bo |
Area-Of-Interest (AOI) Control |
||||||
Andor3FullAOIControl |
asynInt32 |
R/O |
Indicates whether this camera supports full AOI control. This is Yes for the Neo. |
A3_FULL_AOI_CONTROL |
FullAOIControl |
bi |
Andor3Binning |
asynInt32 |
R/W |
Controls the binning. The binning on the sCMOS camera is done in firmware and only
certain preset values are allowed. Choices for the Neo are:
|
A3_BINNING |
A3Binning, A3Binning_RBV |
mbbo, mbbi |
Gating and Image Intensifier Control |
||||||
Andor3GateMode |
asynInt32 |
R/W |
Selects the photocathode gating mode. Choices for the iStar are:
|
A3_GATE_MODE |
GateMode, GateMode_RBV |
mbbo, mbbi |
Andor3InsertionDelay |
asynInt32 |
R/W |
Configures the duration of the gate insertion delay. Choices for the iStar are:
|
A3_INSERTION_DELAY |
InsertionDelay, InsertionDelay_RBV |
mbbo, mbbi |
Andor3MCPGain |
asynInt32 |
R/W |
Controls the voltage applied across the microchannel plate. Range for the iStar is 0-4095. |
A3_MCP_GAIN |
MCPGain, MCPGain_RBV |
longout, longin |
Andor3MCPIntelligate |
asynInt32 |
R/W |
Enables or disables the MCP Intelligate mode. Only available when Normal insertion delay is selected. Choices are 0 (Off) and 1 (On). |
A3_MCP_INTELLIGATE |
MCPIntelligate, MCPIntelligate_RBV |
bo, bi |
The Andor driver implements the following parameters in addition to those in asynNDArrayDriver.h and ADDriver.h.
Unsupported standard driver parameters
ColorMode, ReverseX, and ReverseY are currently not supported.
Usage
If any of the parameters set are out of range the driver will set them to the minimum or maximum allowed value for that parameter. The _RBV value will indicate the actual value in effect.
Configuration
The Andor3 driver is created with the andor3Config command, either from C/C++ or from the EPICS IOC shell.
int andor3Config(const char *portName, const char *cameraSerial,
int maxBuffers, size_t maxMemory,
int priority, int stackSize, int maxFrames)
For details on the meaning of the parameters to this function refer to the detailed documentation on the andor3Config function in the andor3.cpp documentation and in the documentation for the constructor for the andor3 class. The maxFrames parameter controls the number of frame buffers the driver queues to the SDK when acquiring data. The default value is 10. Increasing this number will allow the SDK to transfer images from the camera at the full interface speed even when the driver is not reading them that quickly. This will help to prevent frames from filling the camera RAM when operating close to the maximum interface transfer rate (=TransferRate).
There an example IOC boot directory and startup script (iocBoot/iocAndor3/st.cmd) provided with areaDetector.
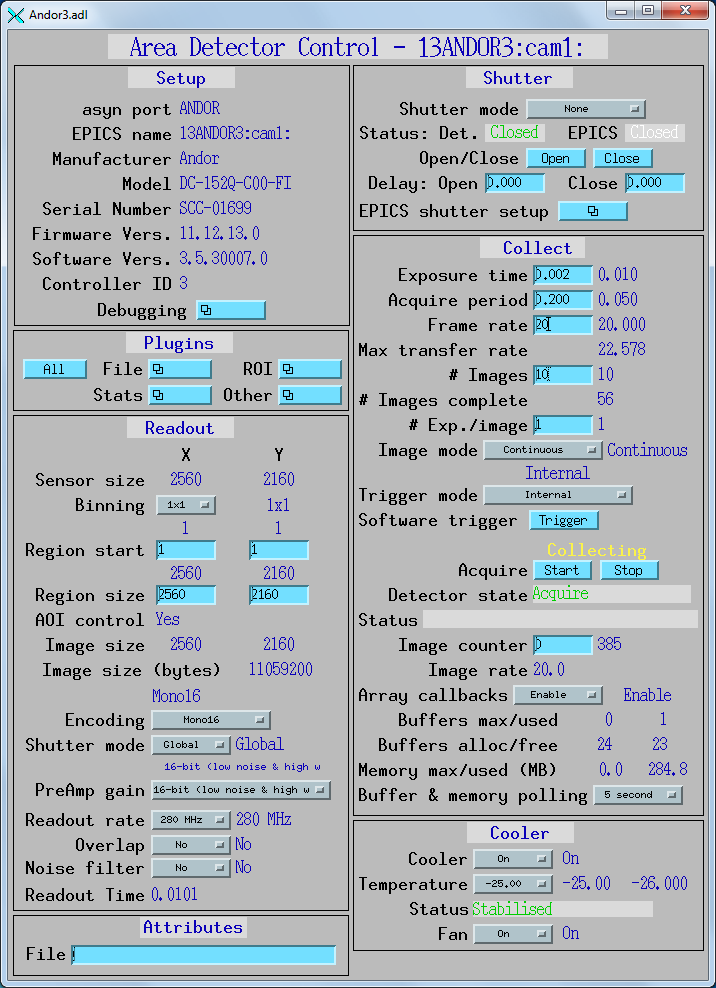
MEDM screen
The following shows the MEDM screen that is used to control the Andor detector. Note that the general purpose screen ADBase.adl can be used, but it exposes a few controls that are not applicable to the Andor, and lacks some fields that are important for the Andor.
Andor3.adl is the main screen used to control the Andor driver.
Andor3.adl
Restrictions
There is currently no way to query the driver to know how much memory remains in the on-board RAM. When the RAM fills up the camera stops acquiring images.